Overview
This project was a dissertation for my BSc in Computer Science which helped me to improve my skills in Robotics and Artificial Intelligence. The main focus of this project was to control a robotic arm by creating an algorithm that calculates the angle, velocity and distance required to grab the ping-pong ball(s) and inverse it to return to its original position. For this to be successfully executed, it required training a Deep Neural Network to identify and classify ping-pong balls using Tensorflow. To view more details, please scroll down to download the report.
Project Objectives
- Gathering and creating a training and test dataset of ping-pong balls which are to be used for the neural network.
- To train the neural network to classify and detect the ping-pong balls.
- To process the neural network and display the detect results in real-time using a webcam.
- To track the ball(s) in its relative positions in 2-D space.
- Finding the maximum movement time and angle of each joint of the arm through trial and error.
- Calculating the angle between the ball and the robotic arm and to move ‘x’ angle.
- To implement an algorithm to get the final/current position of the arm and returning it to the original position.
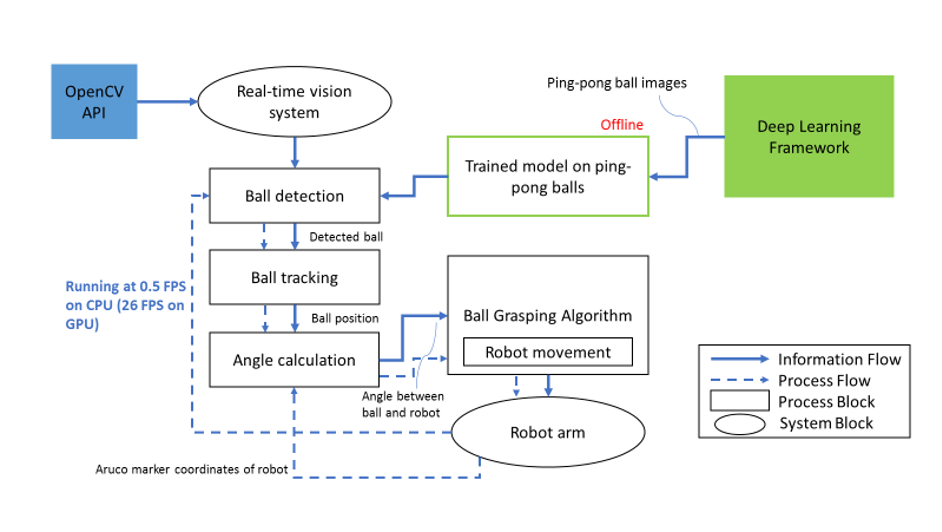
System Design
Gallery

